Mask R-CNN模型总结
论文名称:Mask R-CNN
论文地址:传送门
Introduction
本以为这篇文章是众多R-CNN系列的一个,然而看到作者是kaiming和Ross Girshick,再看知乎上各种“劝退目标检测”,足以见得这篇文章的重要性。事实上,Mask R-CNN确实成为这几年来的baseline。
我们知道目标检测的基本任务是localization和classification,而instance segmentation不仅需要detection,同时也要segmentation,也就是要完成localization、classification、segmentation三项任务。由于其任务复杂,以往的instance segmentation系统也趋向于复杂化。而Mask R-CNN则通过向Faster R-CNN添加一个branch,实现了在detection的同时,完成segmentation的任务。作者指出,在没有使用任何trick的情况下,Mask R-CNN在检测和分割都达到了较好的效果。
同时作者还提出了ROIAlign,用来解决ROIPooling在运算时存在的定位误差。
ROIAlign
本文较为重要的一个概念就是ROIAlign了,但文中并没有清晰的介绍ROIAlign是怎么来的。
ROIPooling存在的问题:两次量化的误差。
- 首先Region Proposal中的坐标是通过回归得到的,一般都是浮点数,如$(cx,cy,w,h)$均是相对于图像长宽的值(范围均是$[0,1]$),同时此时的特征图一般都是较小的(如$[\frac{1}{16}w,\frac{1}{16}h]$),此时若在特征图上取ROI的话,得到的相对坐标也是浮点值,必须进行取整,从而产生误差。
- 其次ROIPooling将一个不同尺寸的Proposal变换到固定的尺寸(如$7 \times 7$),那么此时对Proposal进行划分时所产生的浮点数坐标也要进行取整,因此又产生一个误差。
这些误差在特征图上看似无关紧要,但如果将一个$[\frac{1}{16}w,\frac{1}{16}h]$的特征图映射回去,那么误差将放大16倍,这对小目标的检测是十分重要的。
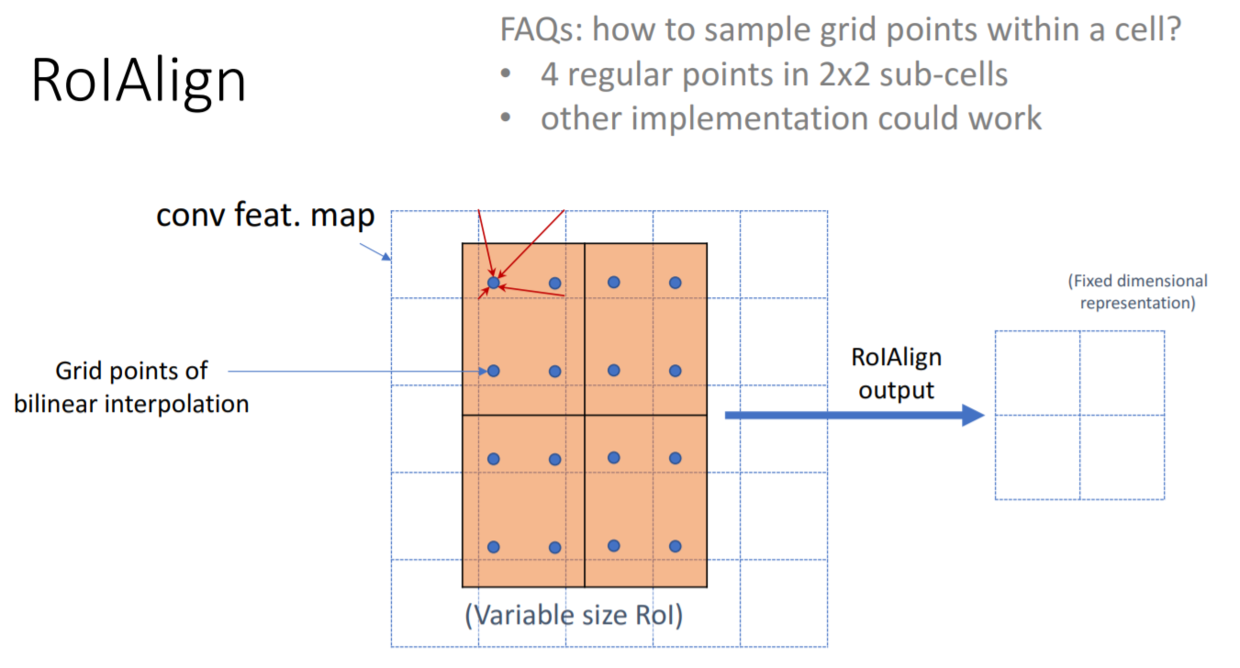
那么ROIAlign做了什么事呢?其实就是将这些取整的操作用双线性插值代替,从而减小误差。
- 在通过回归或者RPN得到坐标后,并不进行取值,保留浮点坐标
- 将Region Proposal划分为$k \times k$个bin,对于每个bin,计算若干中心点的的像素值,取均值或最大值,得到大小为$k \times k$的特征图。
其中对于每个bin,若只计算1个像素值,则对这个bin的中心点坐标进行双线性插值,得到其像素值;若计算4个像素值,则对这个bin划分为4个区域,取各区域的中心,并通过插值计算其像素值,然后取Mean或者Max。
对于ROIPooling,有公式:
$$y_{rj}=x_{i^(r,j)}$$
即$y_{rj}$是从$x_{i^(r,j)}$中的最大值中得到的(MaxPool)
其梯度传播如下:
$$\frac{\partial{L}}{\partial{x_i}}=\sum_r \sum_j[i=i^(r,j)]\frac{\partial L}{\partial y_{rj}}$$
即L对x的梯度仅取决于其取到的那个像素值$x_{i^(r,j)}$
对于ROIAlign,其梯度公式如下:
$$\frac{\partial L}{\partial x_i}\sum_r \sum_j [d(i,i^*(r,j))<1](1-\Delta h)(1- \Delta w)\frac{\partial L}{\partial y_{rj}}$$
即在ROIPooling的基础上,在半径为1的范围内,考虑参与插值的多个点贡献的梯度值,并以距离作为梯度传回大小的衡量。
Mask R-CNN
Mask R-CNN基本上就是在box regression和classification上添加了一个并行的segmentation。segmentation部分已经比较常见,通过对特征图反卷积,产生更大的特征图,即本文中的Mask。
但重要的是,Mask R-CNN将detecction和segmentation结合起来,且实现方式十分的简单。在计算$L_{mask}$时,仅计算第$K$个mask产生的Loss,其中$K$为此box所包含物体的类别;在预测的时候,$K$为分类网络预测出的类别。
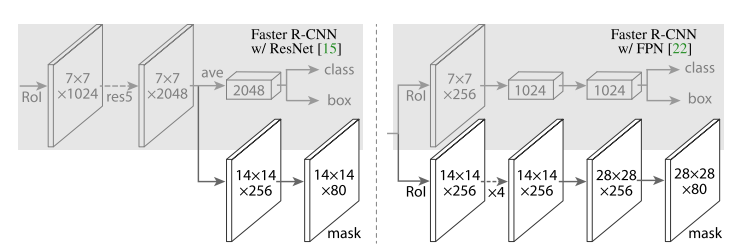
基于此,作者设计了两中结构,左侧为一般的Faster R-CNN,右侧为加入FPN的Faster R-CNN。
Summary
Mask R-CNN在detection领域并不算的多么重大的突破,但在实践过程中发现其收敛速度快,训练效果好,被工业界推崇。其提出的RIOAlign也算是对ROIPooling的一个改进,会逐渐的被采用。将Detection和Segmentation结合 起来进行Instance Segementaion,对IS来说是一个很大啊的突破。
本博客所有文章除特别声明外,均采用 CC BY-SA 4.0 协议 ,转载请注明出处!